|
System /
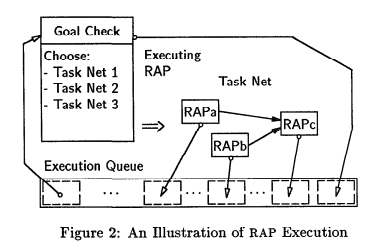
RAPReactive Action PackageThe RAP system was developed by R. James Firby in the late eighties, and saw heavy use as the sequence / executive layer for many Three Level architectures such as 3T and ATLANTIS. Fairly straight forward, so only one paper. There are two main pieces to the system, the interpreter (or sequencer) and the RAPs. A RAP is a collection of sub-tasks and other arranged in a RAP AbstractionA RAP represents a single goal, and it is composed of primitive actions and sub-goals. Sub-goals are themselves RAPs, giving a hierarchical structure. These actions and sub-goals are arranged in a net, with multiple, but limited, possible execution paths. Finally, a RAP contains a goal check, which is used to determine if the goal has been achieved. There are three driving principals that RAPs must abide by:
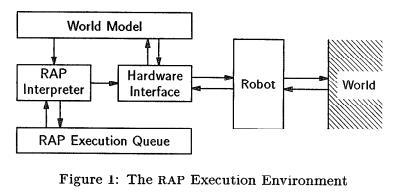
InterpreterThe RAP Interpreter decides which RAP to run at any given time. It maintains a queue of currently executing RAPS, consults with the world model (for goal checks for example), and sends commands to the hardware interface (for example, primitive action commands). It is the hardware interface that is tasked with maintaining the current state of the world model. Limitations (Strengths)This system is intentionally limited to only deal with the current world state in a reactive time scale (real-time is too strong; guarantees can not be made). But it is this limitation that allows RAP to be able to serve as a sequencer in Three Level systems. There are many issues that stem from this lack of foresight, such as the possibility of one RAP clobbering another (conflicting goals) or the mentioned "gas leak" problem in which the a robot carries an oil lamp to the basement to search for a gas leak. However, this can be dealt with at a higher level by a deliberative planner. That planner needs to ensure that there will be no such problems, and the RAP system allows for constraints to be placed on RAPs for this very reason. |